- التسوق ، اصبح سهلا.
- /
- احصل على التطبيق!
Product Parameters Parameters
Input Voltage: 4.5V-36V DC (wide voltage compatibility, built-in LDO step-down to 3.3V).
Logic Level Compatibility: 3.3V/5V TTL (I²C pins withstand 5V).
Gyroscope Range: Programmable ±250°/s, ±500°/s, ±1000°/s, ±2000°/s.
Gyroscope Sensitivity: 131 LSB/°/s (±250°/s range).
Noise Density (Gyro): 0.005°/s/√Hz.
Accelerometer Range: Programmable ±2g, ±4g, ±8g, ±16g.
Accelerometer Sensitivity: 16384 LSB/g (±2g range).
Noise Density (Accel): 300 µg/√Hz.
Data Fusion: Built-in DMP (Digital Motion Processor) for 6-axis/9-axis (with external magnetometer) attitude calculation, outputting Euler angles/quaternions.
Communication Interface: I²C (400kHz, address configurable: 0x68 or 0x69).
Power Consumption:
Operating: 5mA (gyro) + 0.5mA (accel).
Sleep Mode: 5µA (gyro standby).
Operating Temperature: -40°C to +85°C (Reliable).
Mechanical Strength: 10,000g impact resistance.
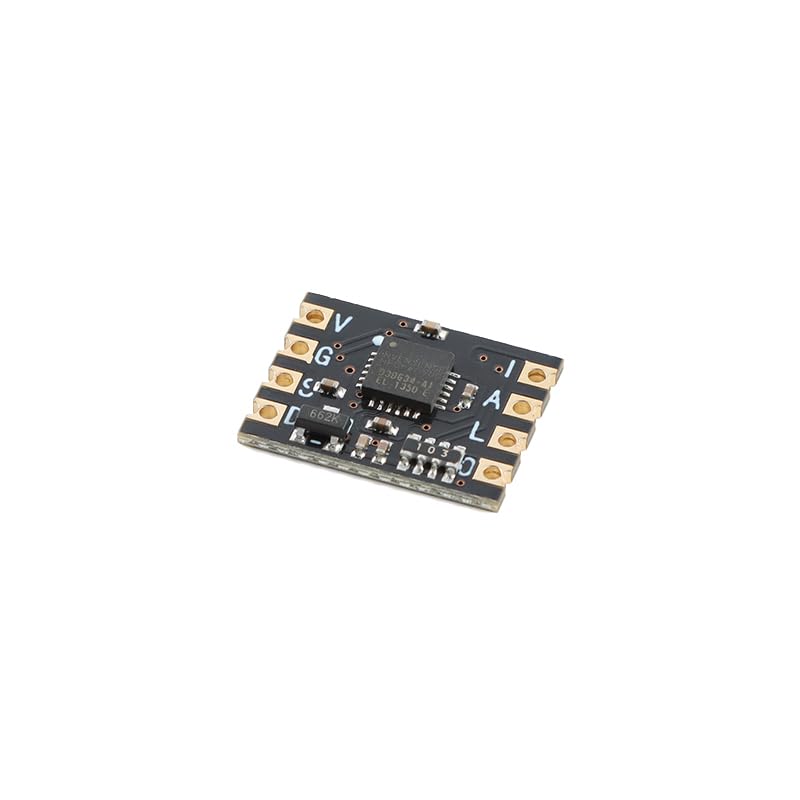
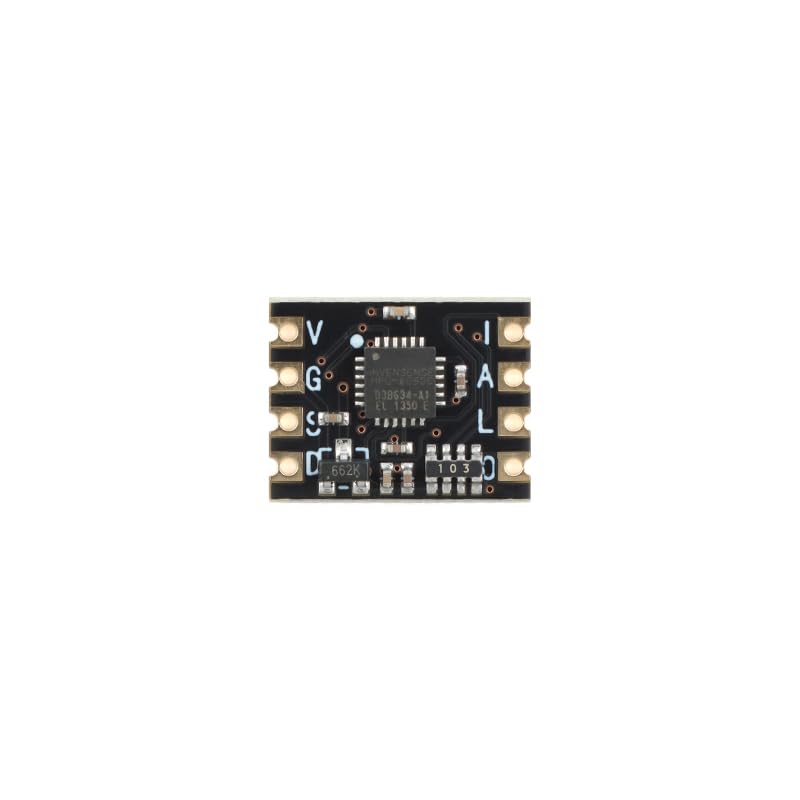
Pin Functions ( )
VIN: DC input positive (4.5V-36V).
GND: Power ground (low-impedance connection recommended).
SCL: I²C clock line (requires external 4.7kΩ pull-up to 3.3V/5V).
SDA: I²C data line (requires external 4.7kΩ pull-up).
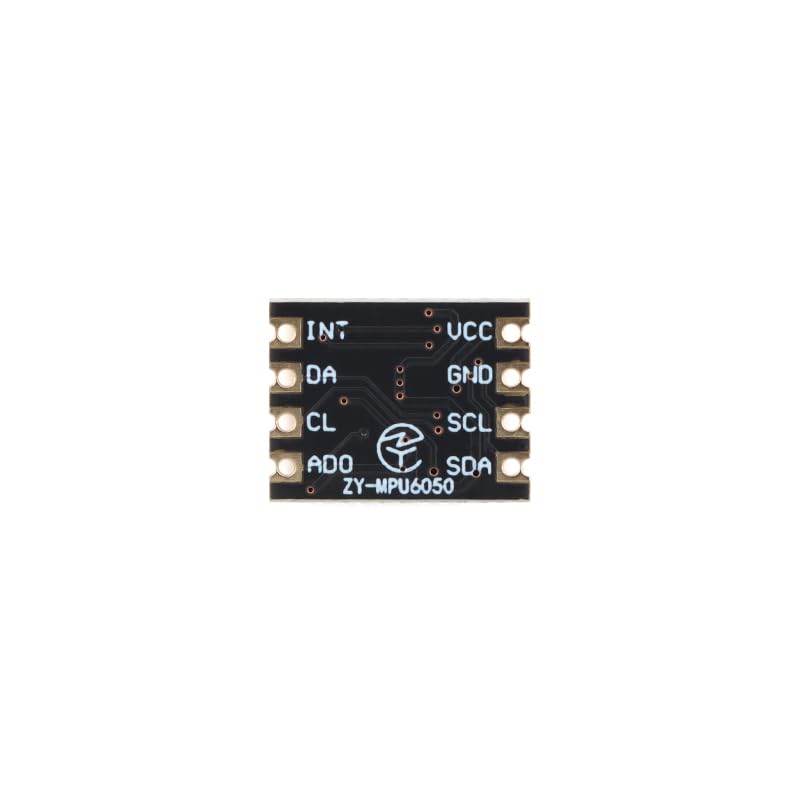
AD0: I²C address select:
Ground: Address 0x68 (default).
Connect to VCC: Address 0x69.
INT: Interrupt output (open-drain, requires external 10kΩ pull-up).
AUX_CL/AUX_DA: Auxiliary I²C for magnetometer expansion (e.g., HMC5883L).
FAQ
1.
I²C Communication Failure?
Check AD0 pin level (default 0x68).

 10 مجموعات RT مقسمة مستشعر المستشعر الموجات فوق الصوتية مسبار 10 أجهزة الإرسال + 10 أجهزة استقبال T + R مجموعة مستشعرات بالموجات فوق الصوتي
KWD 4
10 مجموعات RT مقسمة مستشعر المستشعر الموجات فوق الصوتية مسبار 10 أجهزة الإرسال + 10 أجهزة استقبال T + R مجموعة مستشعرات بالموجات فوق الصوتي
KWD 4
 -44%
Max6675 Type K وحدة استشعار درجة الحرارة الحرارية من أجل Arduino ، قياس درجة حرارة دقيقة 3.0-5.5 فولت
KWD 2.500
-44%
Max6675 Type K وحدة استشعار درجة الحرارة الحرارية من أجل Arduino ، قياس درجة حرارة دقيقة 3.0-5.5 فولت
KWD 2.500
 SPH0645LM4H I2S لوحة كسر الميكروفون MEMS لـ Arduino Raspberry PI ، مستشعر الصوت الرقمي 1.6-3.6V لمشاريع الصوت DIY
KWD 4.500
SPH0645LM4H I2S لوحة كسر الميكروفون MEMS لـ Arduino Raspberry PI ، مستشعر الصوت الرقمي 1.6-3.6V لمشاريع الصوت DIY
KWD 4.500
 وحدة مستشعر MusRock SC8 NDIR CO2 0–5000 جزء في المليون ±50 جزء في المليون +5% دقة UART + إخراج تناظري -10 درجة مئوية إلى +50 درجة مئوية درجة حرارة التشغيل متوافقة مع LabVIEW
KWD 7.500
وحدة مستشعر MusRock SC8 NDIR CO2 0–5000 جزء في المليون ±50 جزء في المليون +5% دقة UART + إخراج تناظري -10 درجة مئوية إلى +50 درجة مئوية درجة حرارة التشغيل متوافقة مع LabVIEW
KWD 7.500