All electronics ship with US style plugs.You may need a voltage converter or a plug adapter.
Special Features
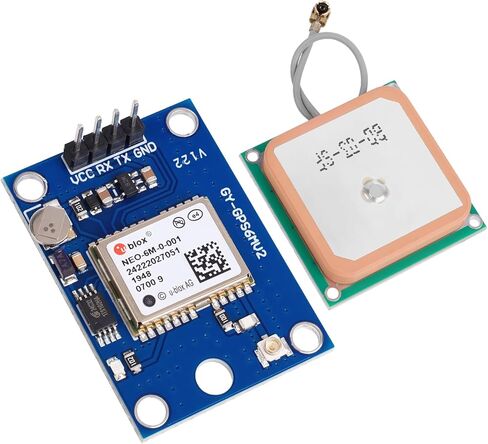
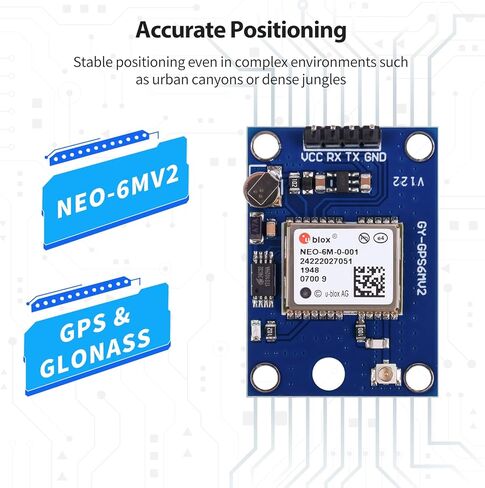
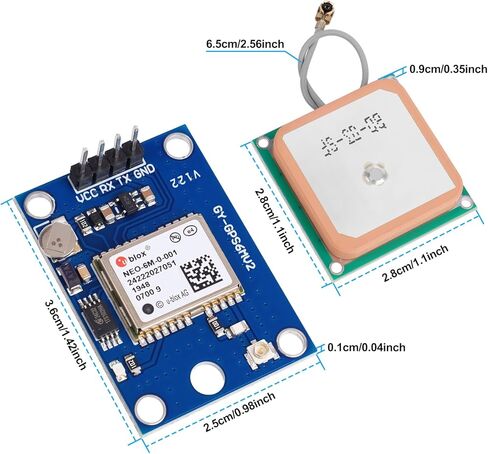
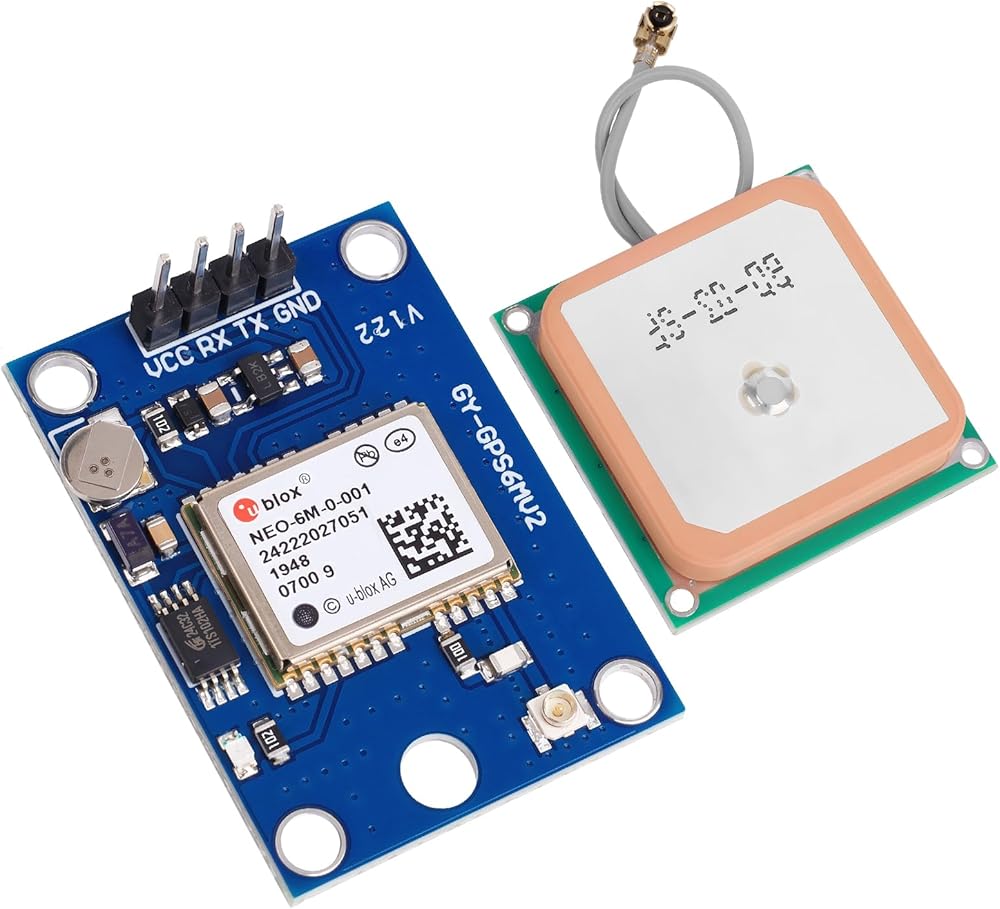
Accurate Positioning: Based on NEO-6MV2, supports GPS and GLONASS, supports simultaneous tracking of 22 satellites, tracking sensitivity -162dBm, cold-start sensitivity -148 dBm, positioning accuracy up to ±2.5m in open environments, stable positioning even in complex environments such as urban canyons or dense jungles
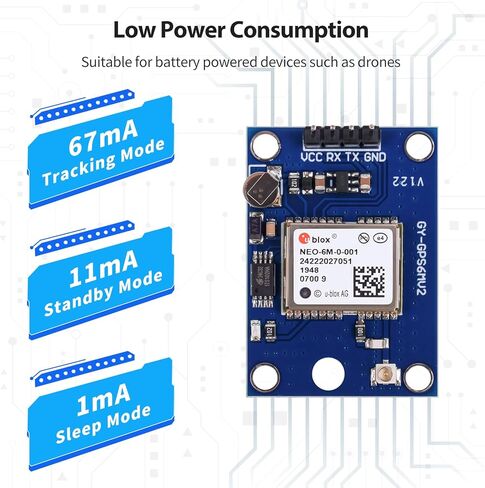
Low Power Consumption: Supporting 3.3V-5V power supply, the continuous operating current is 67mA, 11mA in standby mode, and 1mA during sleep, which ensures the positioning accuracy while controlling the energy consumption to the maximum, especially suitable for the scenarios that are sensitive to the endurance, and significantly reduces the cost of post maintenance
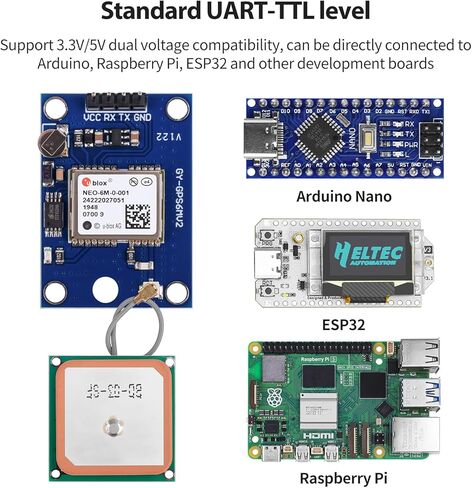
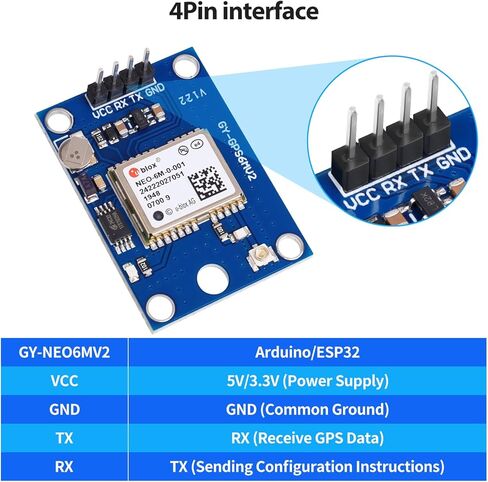
Hardware Interface: Standard UART-TTL level, support 3.3V/5V dual voltage compatibility, can be directly connected to Arduino, Raspberry Pi, ESP32 and other development boards; 4Pin interface ( VCC, GND, TX, RX), reserved hardware reset pin; baud rate support 4800bps~115200bps (default 9600bps), real-time switching through AT instructions or UBX commands, to adapt to different master performance
Plug and Play: Onboard EEPROM chip operates independently of the main control chip, saves configuration parameters after power failure, and automatically reads the parameters (baud rate, positioning mode, NMEA statement screening) from the EEPROM when the power is on, eliminating the need to repeat the initialisation, and realising Plug and Play
Widely Application: Widely used in vehicle monitoring, UAV navigation, handheld terminals and other scenarios that require high-precision positioning. You can also combine with Arduino, STM32, LoRa module, etc. to quickly build GPS tracker, weather station and other IoT applications
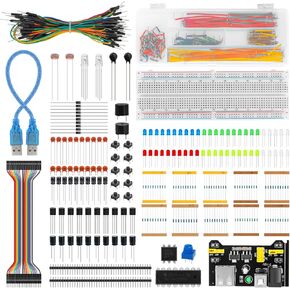 Electronics Basic Starter Kit for Arduino, 830 tie-Points Breadboard with Power Supply, More Than 400pcs Components Electronics Fun Kit Compatible with Arduino UNO R3, Raspberry Pi, STM32
KWD 5.500
Electronics Basic Starter Kit for Arduino, 830 tie-Points Breadboard with Power Supply, More Than 400pcs Components Electronics Fun Kit Compatible with Arduino UNO R3, Raspberry Pi, STM32
KWD 5.500
 Raspberry Pi Pico W- Raspberry Pi Pico RP2040 chip, Built-in WiFi,Supports 2.4/5 GHZ, Bluetooth 5.2 Supported, WiFi Wireless Bluetooth Single Board Computer
KWD 7
Raspberry Pi Pico W- Raspberry Pi Pico RP2040 chip, Built-in WiFi,Supports 2.4/5 GHZ, Bluetooth 5.2 Supported, WiFi Wireless Bluetooth Single Board Computer
KWD 7
 -22%
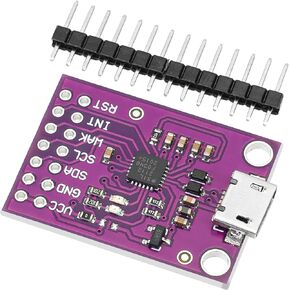
CP2112 MCU-2112 Debug Board USB to SMBus I2C Communication Module 2.0 MicroUSB 2112 Evaluation Kit Sensor Module Adapter for CCS811 Sensor Module for Arduino - 1 piece
KWD 3.500
-22%
CP2112 MCU-2112 Debug Board USB to SMBus I2C Communication Module 2.0 MicroUSB 2112 Evaluation Kit Sensor Module Adapter for CCS811 Sensor Module for Arduino - 1 piece
KWD 3.500
 Micro GPIO Terminal Block Breakout Board for Raspberry Pi 4B/3B, DIY Circuit GPIO Expansion Board with Pins, Acrylic Board, Mini Screw for Raspberry Pi 4B/3B+/3B/2B/Pi Zero/Pi Zero W/Pi Zero 2 W
KWD 7
Micro GPIO Terminal Block Breakout Board for Raspberry Pi 4B/3B, DIY Circuit GPIO Expansion Board with Pins, Acrylic Board, Mini Screw for Raspberry Pi 4B/3B+/3B/2B/Pi Zero/Pi Zero W/Pi Zero 2 W
KWD 7