كاميرا عمق ثلاثية الأبعاد من Astra Pro دقة داخلية ±3 مم، نطاق أقصى 8 أمتار، مزامنة كاميرات متعددة، جزء روبوت ROS1/2 لأبحاث الروبوتات، رؤية الذكاء الاصطناعي، SLAM، مسح ثلاثي الأبعاد
الاجهزه الالكترونيات الامريكية قد تحتاج الى محمول فولت من ١١٠ الى ٢٢٠.قد تحتاج إلى محول كهرباء
مميزات خاصة
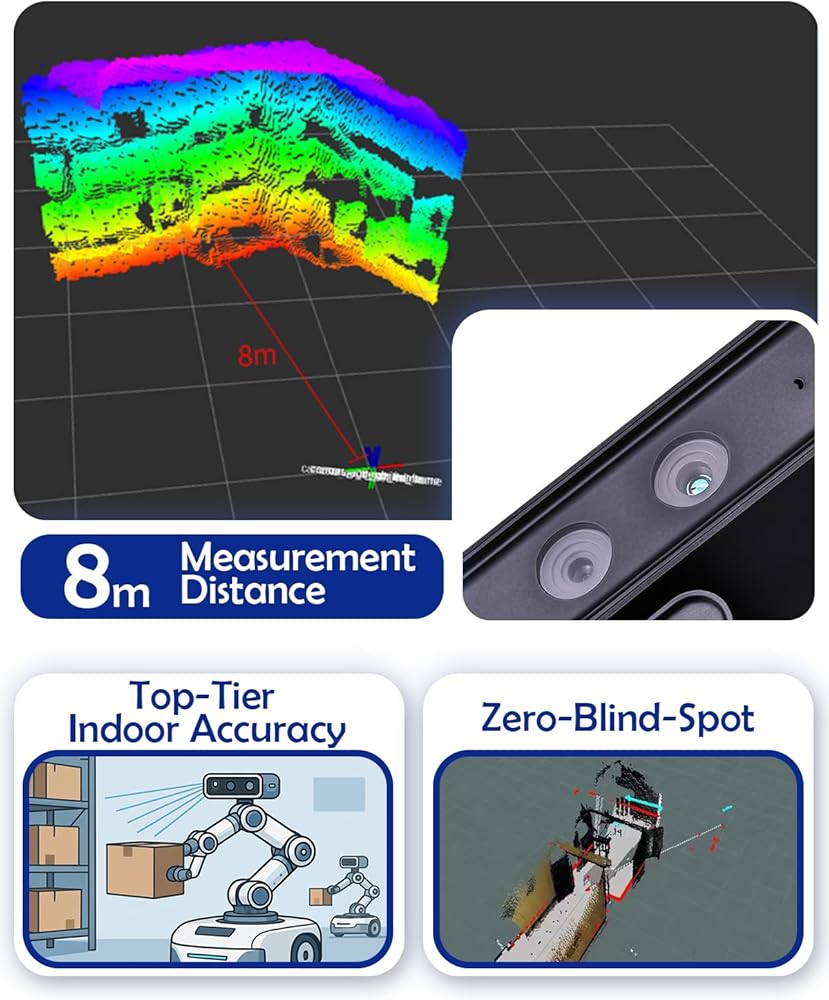
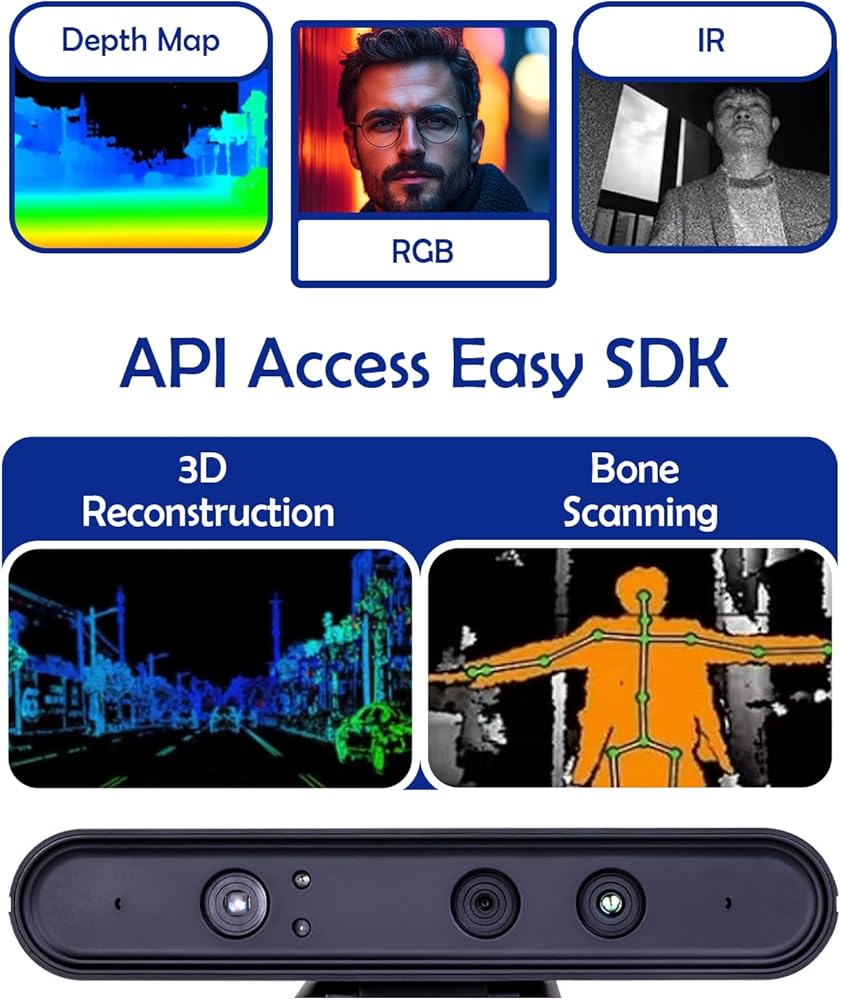
دقة داخلية بدرجة مختبرية، ±3 مم عند 1 متر - احصل على دقة أقل من المليمتر باستخدام تقنية الإضاءة المنظمة. مثالي للنمذجة ثلاثية الأبعاد والتعرف على إيماءات VR AR ومهام رؤية الذكاء الاصطناعي. لا توجد قياسات للنقاط العمياء في المختبر أو المستودع أو البيئات الصناعية الخاضعة للرقابة. طويل المدى (8 أمتار) للخدمات اللوجستية أو RGB عالي الدقة (1280 × 720) للبيانات المرئية المحسنة. تتضمن مخرجات الكاميرا ثلاثية الأبعاد السحب النقطية وخرائط العمق والأشعة تحت الحمراء وRGB.
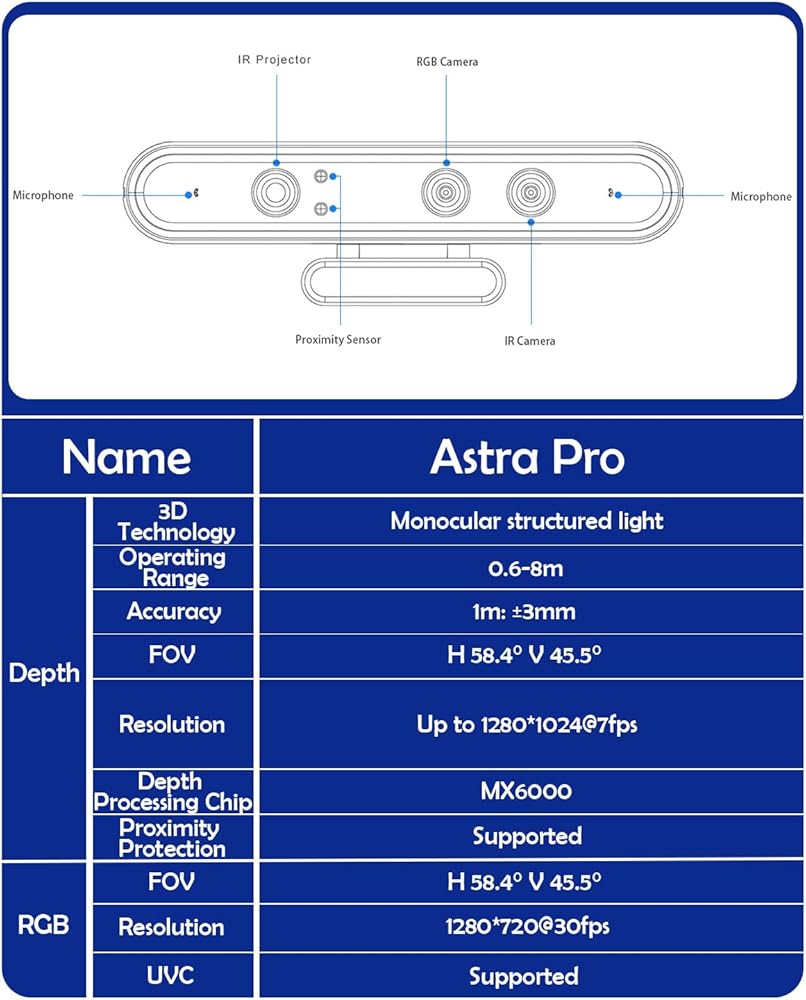
معالجة عالية الكفاءة للروبوتات في الوقت الفعلي - مدعومة بـ Orbbec ASIC، توفر كاميرا الروبوت Astra Pro عمقًا عالي الدقة وخاليًا من الشوائب عند 1280×1024 @ 7 إطارًا في الثانية وRGB بسرعة 1280×720 @ 30 إطارًا في الثانية في وقت واحد. مع نطاقات تتراوح من 0.6 إلى 8 أمتار، يتفوق التحسين في التطبيقات الخالية من التأخير مثل SLAM، والأتمتة، وتجنب العوائق، وتقدير الوضعية - مما يجعل Astra Pro بمثابة الكاميرا الأولى للتحكم الآلي الداخلي حيث يكون كل مللي ثانية مهمًا.
مزامنة سلسة للكاميرات المتعددة للأنظمة القابلة للتطوير - مزامنة ما يصل إلى 30 مستشعرًا بمعدل 30 إطارًا في الثانية مع عدم وجود قطرات للإطار - مما يتيح مسحًا حقيقيًا للبيئة بزاوية 360 درجة، وتتبع الحركة على نطاق واسع، والتنسيق بين الروبوتات المتعددة في أقل من مللي ثانية. في الروبوتات متعددة الوكلاء، لا يعد التوقيت المثالي لأجزاء الروبوت ميزة... إنها الميزة الحاسمة لمطوري الروبوتات.
طاقة منخفضة للغاية ومحمولة - عمر البطارية يمكن أن يؤدي إلى إنشاء الروبوتات المحمولة أو كسرها. سحب الطاقة أقل من 3 وات ووزن منخفض يصل إلى 310 جم - بطارية صديقة لـ AMR وAGV والطائرات بدون طيار والمنصات المحمولة وإعدادات البحث الميداني. يتيح الحجم الصغير التكامل في الأنظمة المدمجة والأجهزة القابلة للارتداء، مما يؤدي إلى تبسيط التطوير للإدراك أثناء التنقل في النماذج الأولية للبحث أو الروبوتات القابلة للنشر ميدانيًا.
تكامل التوصيل والتشغيل للنماذج الأولية السريعة – اتصال USB 2.0 أحادي الكابل (الطاقة + البيانات)، استبدال مباشر للأنظمة القديمة. متوافق تمامًا مع Orbbec SDK وOpenNI، فهو يتيح التكامل بسرعة البرق في raspberry pi أو ROS أو Unity أو خطوط الأنابيب المخصصة لرؤية الروبوت ومعالجة الكائنات ومشاريع إعادة البناء ثلاثية الأبعاد، مما يمكّن مهندسي الروبوتات من نشر استشعار العمق الدقيق من المفهوم إلى الواقع في ساعات، وليس أسابيع.

 جليسون ريل BH-09 موازن الأدوات شديد التحمل 9-20 رطل.
KWD 317
جليسون ريل BH-09 موازن الأدوات شديد التحمل 9-20 رطل.
KWD 317
 عجلة متعددة الاتجاهات، قابلة للدوران بزاوية 360 درجة، ثبات حمل ممتاز يصل إلى 2 كجم لمسابقات الروبوتات
KWD 7.500
عجلة متعددة الاتجاهات، قابلة للدوران بزاوية 360 درجة، ثبات حمل ممتاز يصل إلى 2 كجم لمسابقات الروبوتات
KWD 7.500
 بديل متوافق مع عجلة العجلة الأمامية لفراغات الروبوت Shark - متوافق مع RV700 ، RV750 ، RV761 ، RV1000 ، RV2610WA ، AV2501AE ، AV2610WA ، RV2400WD & More
KWD 5
بديل متوافق مع عجلة العجلة الأمامية لفراغات الروبوت Shark - متوافق مع RV700 ، RV750 ، RV761 ، RV1000 ، RV2610WA ، AV2501AE ، AV2610WA ، RV2400WD & More
KWD 5
 روبوت يدوية التحكم في القفازات الإيماءة لاستشعار Arduino Robot مفتوح المصدر اللاسلكي الحسية الجسدية قفاز روبوت روبوت روبوت ثانوي التنمية
KWD 45.500
روبوت يدوية التحكم في القفازات الإيماءة لاستشعار Arduino Robot مفتوح المصدر اللاسلكي الحسية الجسدية قفاز روبوت روبوت روبوت ثانوي التنمية
KWD 45.500