- التسوق ، اصبح سهلا.
- /
- احصل على التطبيق!
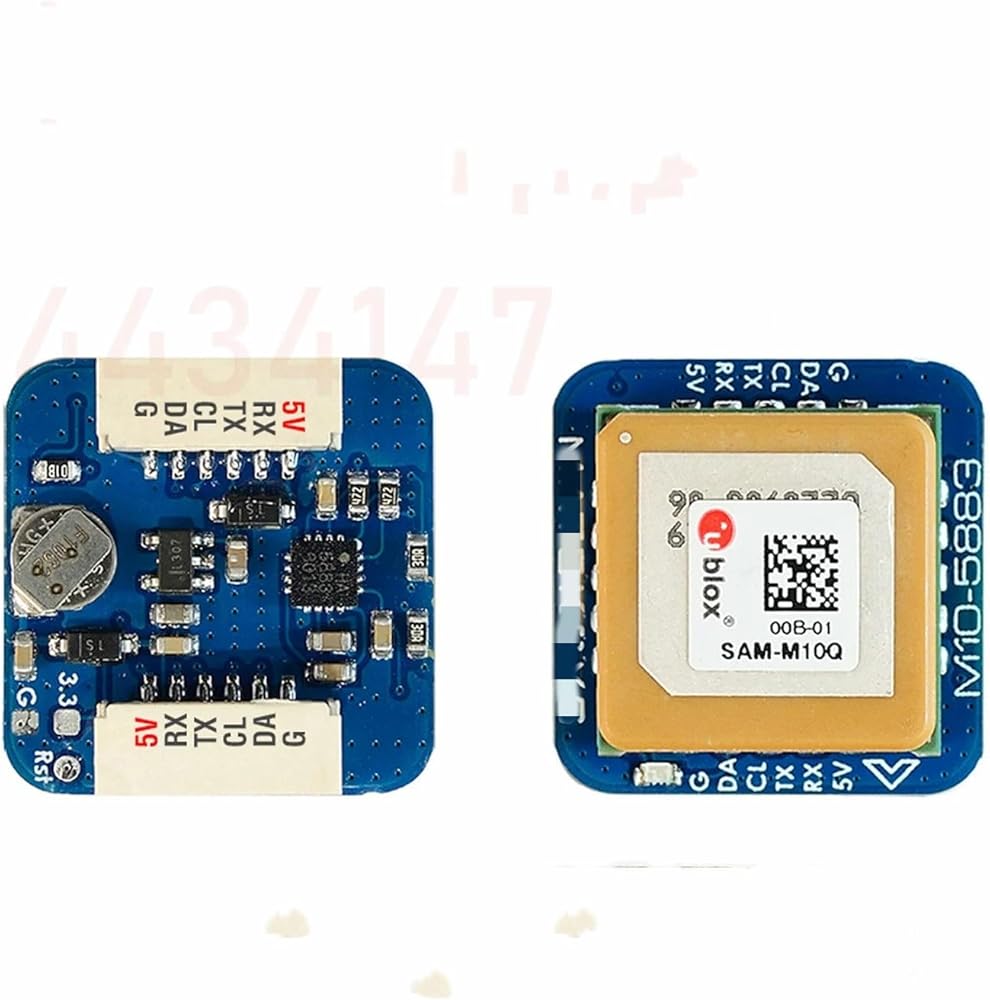
For Matek Systems GNSS M10Q-5883 For U B x M10 GPS with Compass QMC5883L Module Digital AirSpeed 4~9V For FPV Racing Drone
Specifications
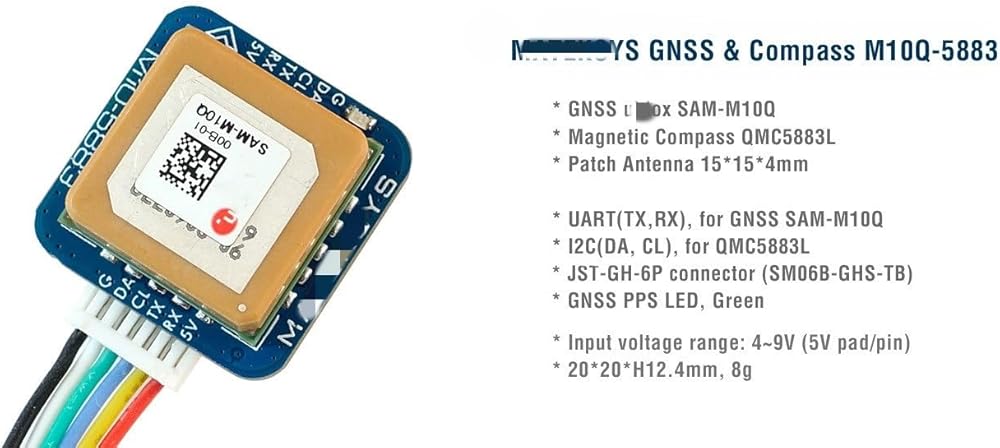
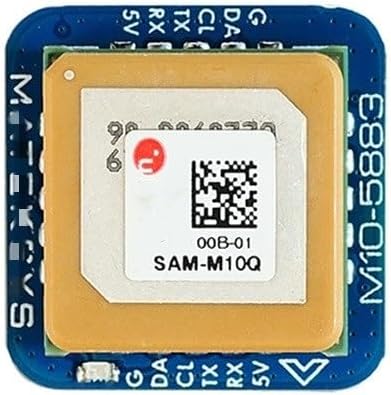
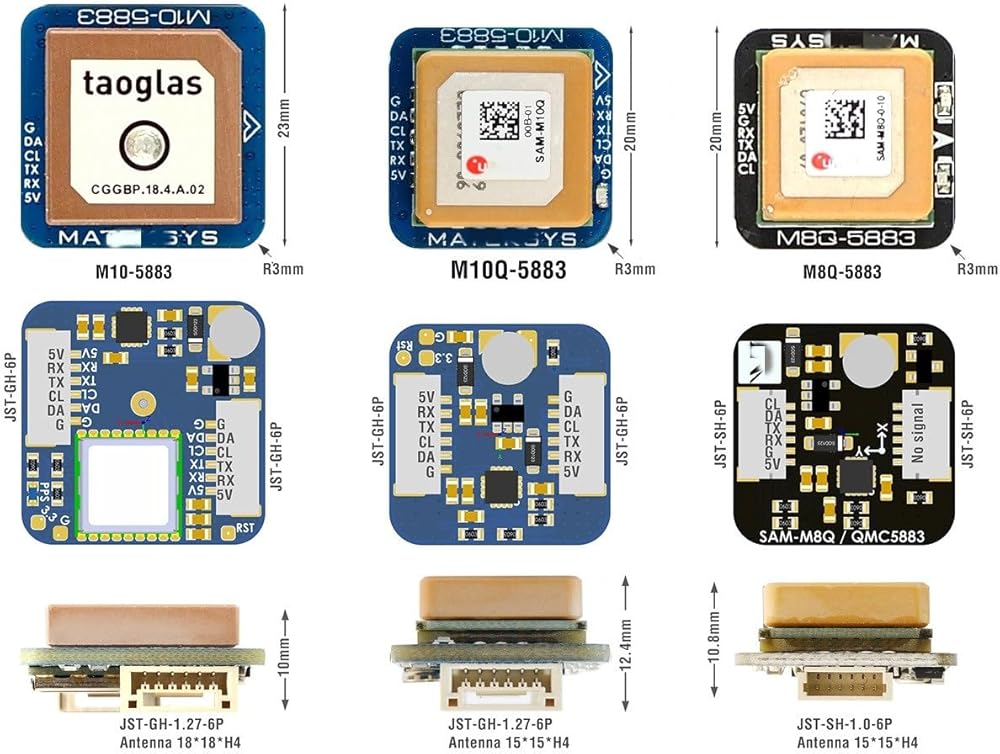
GNSS For u b x SAM-M10Q (For GPS, For GLONASS, For Galileo and For BeiDou)
Magnetic Compass QMC5883L
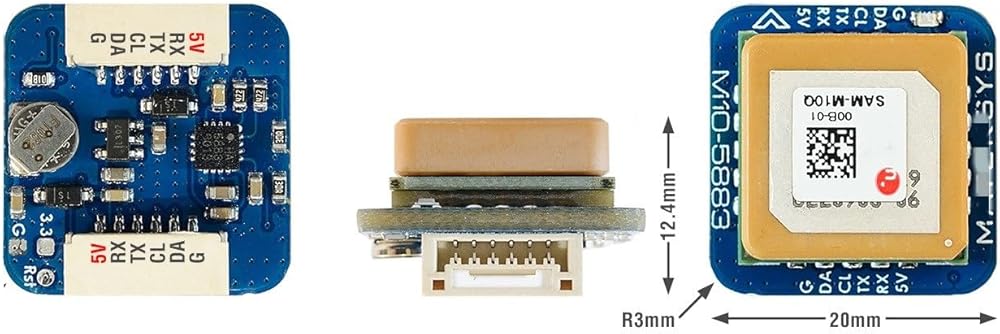
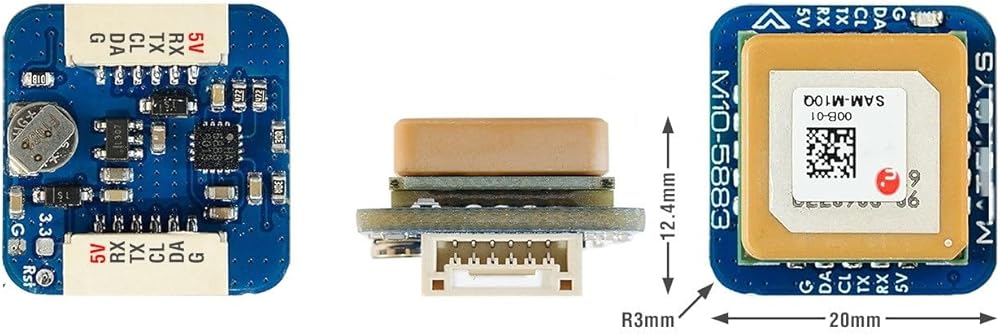
Patch ant 15*15*4mm
Input voltage range: 4~9V (5V pad/pin)
Power consumption: 13mA
For UART baudrate: 9600 default
Operating Temperatures: -20~80 °C
For UART(For TX, For RX) interface for GNSS SAM-M10Q-00B
I2C(DA, CL) interface for Compass QMC5883L
For JST-GH-6P connector (SM06B-GHS-TB). 1.27mm pitch
GNSS PPS , Green. (Solid ON after powering on, blinking(1Hz) when GNSS get 3D fix)
Protocol: For U B X
5Hz@GPS+GAL+BDS B1C+GLO or NMEA 1Hz
20mm*20mm*12.4mm
8g
M10Q-5883_step.zip
Includes
1x M10Q-5883
1x For JST-GH-6P to for JST-GH-6P 20cm silicon wire
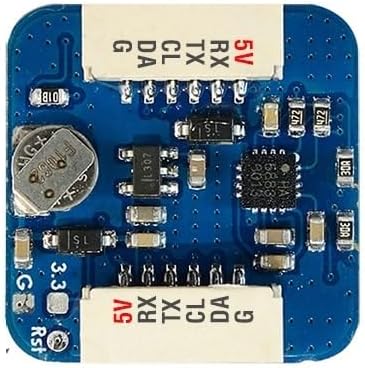
Wiring and settings
M10Q-5883 5V to Flight controller 4~9V
M10Q-5883 RX to Flight controller UART_TX
M10Q-5883 TX to Flight controller UART_RX
M10Q-5883 CL to Flight controller I2C_SCL
M10Q-5883 DA to Flight controller I2C_SDA
M10Q-5883 G to Flight controller GND
Tips and Notes
Compass Alignment(flat mounting): Tilting the magnetometer is strongly discouraged !
For INAV/For BetaFLight: compass Arrow forward, set CW 270° Flip when flight controller arrow is facing forward.
For INAV/For BetaFLight: compass Arrow backward, set CW 90° Flip when flight controller arrow is facing forward.
For Ardupilot/Mission Planner: Rotation None.
Make sure to have compass/magnetometer 10cm away from power lines/ESC/motors/iron based material
------
For INAV 5.0.0, For Betaflight 4.3.0, For ArduPilot 4.3 or newer is required.
For U B X NEO-M9N, MAX-M10S, SAM-M10Q series all don't have dataflash built in. once GNSS is powered off and the supercapacitor run out. the settings will back to default.
For U B X protocol is bidirectional. Flight controller
 -36%
طائرة بدون طيار من Holy Stone HS720E GPS مع كاميرا 4K EIS UHD 130 FOV للبالغين المبتدئين، طائرة رباعية المروحية FPV مع محرك بدون فرش، بطاريتان 46 دقيقة من وقت الطيران، ناقل حركة 5 جيجا هرتز، العودة الذكية إلى المنزل، اتبعني
KWD 55
-36%
طائرة بدون طيار من Holy Stone HS720E GPS مع كاميرا 4K EIS UHD 130 FOV للبالغين المبتدئين، طائرة رباعية المروحية FPV مع محرك بدون فرش، بطاريتان 46 دقيقة من وقت الطيران، ناقل حركة 5 جيجا هرتز، العودة الذكية إلى المنزل، اتبعني
KWD 55
 MIGHTY SKINS متوافقة مع طائرة DJI Mini 2 المحمولة بدون طيار - طلاء رطب | غطاء ملتف واقٍ ومتين وفريد من نوعه من الفينيل | سهل التطبيق والإزالة وتغيير الأنماط | صنع في الولايات المتحدة الأمريكية
KWD 13.500
MIGHTY SKINS متوافقة مع طائرة DJI Mini 2 المحمولة بدون طيار - طلاء رطب | غطاء ملتف واقٍ ومتين وفريد من نوعه من الفينيل | سهل التطبيق والإزالة وتغيير الأنماط | صنع في الولايات المتحدة الأمريكية
KWD 13.500
 ملحقات الطائرة بدون طيار INLIMA لشفرات مراوح الطائرة بدون طيار LYZRC L800 Pro2 Rc شفرات مابل ليف L800pro2 كوادكوبتر لملحقات LYZRC L800 Pro2 Rc بدون طيار قابلة للاستبدال (اللون: 8 قطع)
KWD 15
ملحقات الطائرة بدون طيار INLIMA لشفرات مراوح الطائرة بدون طيار LYZRC L800 Pro2 Rc شفرات مابل ليف L800pro2 كوادكوبتر لملحقات LYZRC L800 Pro2 Rc بدون طيار قابلة للاستبدال (اللون: 8 قطع)
KWD 15
 تشيروينج طائرة درون كوادكوبتر CW4 بجهاز تحكم عن بعد مع كاميرا HD 720P للاطفال والكبار مع تحليق تلقائي
KWD 18.500
تشيروينج طائرة درون كوادكوبتر CW4 بجهاز تحكم عن بعد مع كاميرا HD 720P للاطفال والكبار مع تحليق تلقائي
KWD 18.500